
www.engineering-japan.com
27
'26
Written on Modified on
FANUC、NVIDIAとの連携を強化
ファナックとNVIDIA、産業用ロボットのデジタルツイン精度向上のため、高度なシミュレーションと基盤モデルの統合で協業。
www.fanuc.eu
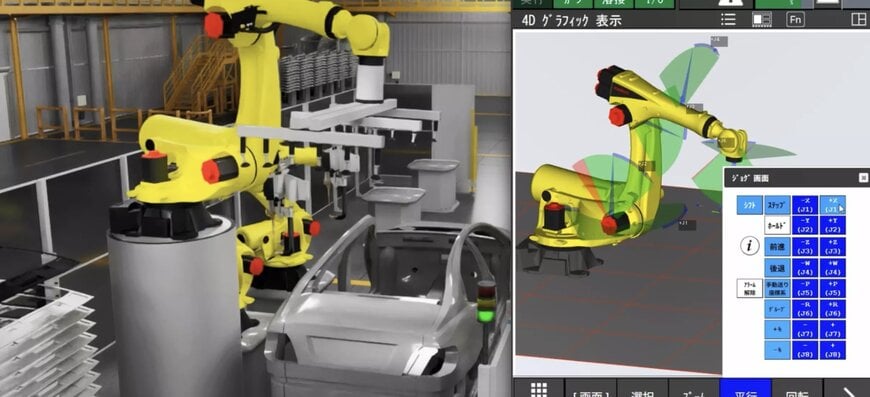
ファナックとNVIDIAは、産業用ロボットのデジタルツインの精度を向上させるため、高度なシミュレーションアーキテクチャと基盤モデルの統合に向けて協業しています。
この協力関係は、「シミュレーションと現実のギャップ(sim-to-real gap)」の解消や、製造・組立環境における変動性の高い手作業の自動化という、現場の運用上の課題に対応するものです。精密なモーションコントロールソフトウェアと、GPUで加速された物理エンジンおよび人工知能(AI)モデルを組み合わせることで、両社は産業用自動化を「厳密に事前プログラミングされたルーティン」から「適応型のフィジカルAI(Physical AI)システム」へと移行させることを目指しています。
技術アーキテクチャとソフトウェアの統合
主要なソリューションの中心となるのは、NVIDIA Isaac SimとファナックのROBOGUIDEソフトウェアスーツの双方向の統合です。この技術フレームワークのもと、それぞれのエンジニアリング機能に基づいて、ソフトウェアレイヤー間で以下のように役割が分担されています。
- ファナック: コアとなるロボットモーションコントロールアルゴリズム、サイクルタイム計算機、バーチャルティーチペンダント、および3Dビジョンシステムの処理を提供。
- NVIDIA: Isaac Simフレームワーク、PhysX物理エンジン、Isaac Lab学習環境、およびロボット基盤モデル「GR00T」を提供。
このプラットフォームは、2つの異なる運用モードを通じて機能します。
- 第1の構成: Isaac Simが最前面で動作して物理的に正確なセンサー環境をレンダリングし、ROBOGUIDEがバックグラウンドで継続的に通信することで、実際の機械と同一の軌跡(トラジェトリ)および実行時間を保証します。
- 第2の構成: ROBOGUIDEがユーザーインターフェースを駆動し、NVIDIA PhysXエンジンが剛体ダイナミクス、接触力、および重力モデリングのリアルタイム計算を処理します。
システム機能と運用ロジック
本システムは、標準化されたデジタルインターフェースを利用して、並行する環境を同期させます。バラ積みピッキングのような複雑なタスクを実行する際、ランダムに積み上げられた部品は物理ベースのモデリングを介してシミュレートされます。ファナックの3Dビジョンシステムが仮想の山をスキャンして部品の座標を特定し、バックグラウンドの物理エンジンを通じてピッキング&プレースの軌跡をルーティングすることで、ロボットアームの自己衝突や部品の滑りが発生しないことを検証します。
衣類の折りたたみといった柔軟なコンポーネントの取り扱いにおいて、システムは従来のビジョンベースの経路補正をバイパスします。その代わりに、NVIDIA GR00T基盤モデルを活用して、人間のオペレーターからキャプチャした模倣学習データを処理します。ファナックのモーションコントロール技術が、結果として得られるニューラルネットワークの出力を滑らかにし、リアルタイムで流動的かつ連続的な物理モーター電流へと変換します。
導入と展示会での検証
統合された技術は、段階的な物理および仮想テストサイクルを経て導入されてきました。初期の検証は東京で開催された国際ロボット展(iREX)で行われ、技術チームによって経路再現の精度が検証されました。
その後、2026年5月に開催されたファナックの「新商品発表展示会(オープンハウス)」に先立ち、さらなるアーキテクチャのアップグレードが完了しました。この導入フェーズでは、更新されたエッジコンピューティングインフラストラクチャで構成された、物理的な双腕CRX協働ロボットシステムが導入されました。このシステムは、レガシーなハードウェアモジュールをNVIDIA Jetson Thorプラットフォーム(Jetson T5000モジュールを採用)に置き換えることで、ローカルのAIコンピューティング能力を7.5倍以上に増強し、リアルタイムの人・ロボット衝突回避ループを加速させています。
産業用途と効率面でのメリット
対象となるアプリケーション領域は、量産自動車の組立、エレクトロニクス製造、そして物流倉庫の仕分けにまで及びます。具体的な技術的ユースケースとしては、柔軟なケーブルの配線シミュレーション、高精度な部品挿入、および非構造化環境下での自動バラ積みピッキングなどが挙げられます。
この統合されたデジタルインフラストラクチャを実装することで、工場などの施設はより高いプロセスの安定性、安全性、および保守性を達成できます。この導入における技術的な合理性は、「物理的な試作(プロトタイピング)の排除」にあります。高忠実度(ハイフィデリティ)なシミュレーションループ内で実現可能性やバーチャルコミッショニング(仮想試運転)の調査を完結させることで、自動化エンジニアは工場の床に物理的なハードウェアを設置する前に、サイクルタイムを最適化し、機械的な偏差を予測することが可能になります。
(編集:Romila DSilva、Induportals編集者、AI支援による)
本システムは、標準化されたデジタルインターフェースを利用して、並行する環境を同期させます。バラ積みピッキングのような複雑なタスクを実行する際、ランダムに積み上げられた部品は物理ベースのモデリングを介してシミュレートされます。ファナックの3Dビジョンシステムが仮想の山をスキャンして部品の座標を特定し、バックグラウンドの物理エンジンを通じてピッキング&プレースの軌跡をルーティングすることで、ロボットアームの自己衝突や部品の滑りが発生しないことを検証します。
衣類の折りたたみといった柔軟なコンポーネントの取り扱いにおいて、システムは従来のビジョンベースの経路補正をバイパスします。その代わりに、NVIDIA GR00T基盤モデルを活用して、人間のオペレーターからキャプチャした模倣学習データを処理します。ファナックのモーションコントロール技術が、結果として得られるニューラルネットワークの出力を滑らかにし、リアルタイムで流動的かつ連続的な物理モーター電流へと変換します。
導入と展示会での検証
統合された技術は、段階的な物理および仮想テストサイクルを経て導入されてきました。初期の検証は東京で開催された国際ロボット展(iREX)で行われ、技術チームによって経路再現の精度が検証されました。
その後、2026年5月に開催されたファナックの「新商品発表展示会(オープンハウス)」に先立ち、さらなるアーキテクチャのアップグレードが完了しました。この導入フェーズでは、更新されたエッジコンピューティングインフラストラクチャで構成された、物理的な双腕CRX協働ロボットシステムが導入されました。このシステムは、レガシーなハードウェアモジュールをNVIDIA Jetson Thorプラットフォーム(Jetson T5000モジュールを採用)に置き換えることで、ローカルのAIコンピューティング能力を7.5倍以上に増強し、リアルタイムの人・ロボット衝突回避ループを加速させています。
産業用途と効率面でのメリット
対象となるアプリケーション領域は、量産自動車の組立、エレクトロニクス製造、そして物流倉庫の仕分けにまで及びます。具体的な技術的ユースケースとしては、柔軟なケーブルの配線シミュレーション、高精度な部品挿入、および非構造化環境下での自動バラ積みピッキングなどが挙げられます。
この統合されたデジタルインフラストラクチャを実装することで、工場などの施設はより高いプロセスの安定性、安全性、および保守性を達成できます。この導入における技術的な合理性は、「物理的な試作(プロトタイピング)の排除」にあります。高忠実度(ハイフィデリティ)なシミュレーションループ内で実現可能性やバーチャルコミッショニング(仮想試運転)の調査を完結させることで、自動化エンジニアは工場の床に物理的なハードウェアを設置する前に、サイクルタイムを最適化し、機械的な偏差を予測することが可能になります。
(編集:Romila DSilva、Induportals編集者、AI支援による)
