
www.engineering-japan.com
19
'23
Written on Modified on
4 つの「目」で優れた視覚的処理
3D コンテナ検査を通じたプレス加工品の自動搬出入

アプリケーション
FrameSenseが自動化するために設計された実際のワークフローは、多くの製造業務の一部です。機械から排出された部品がプレスされ、コンベアベルトに載せられてコンテナに移動します。そこで積み重ねられます。コンテナがいっぱいになると、次の生産ステップに進み、車両へと組み込まれます。
これまでは、従業員がコンテナへの積載を担当していました。これはシンプルなサブタスクのように思えますが、実は複雑です。実際の挿入プロセスに加えて、最初のステップは部品に応じた適切な空きスペースを判断することです。同時に、インターロックなどの干渉要因があれば取り除く必要があり、「入れ物」に欠陥がないか、全般的なチェックを行う必要があります。これらの作業はすべて、ビジョンシステムを搭載したロボットに引き継がれようとしています。しかしここで技術的な課題が生じます。コンテナは異なるメーカーから提供され、タイプがさまざまであるため、寸法が異なります。

部品をラックの櫛歯に挿入するとき、ロボットはミリ単位の精度で操作しなければなりません。
4 台の 3D カメラを利用して、タイプ、形状、位置を検査
完全自動の搬出入のためには、ロボットのいわゆるマルチベクトル補正のために、コンテナのいくつかの関連する特徴の位置を決定しなければなりません。そのために該当するコンテナのタイプ、形状、位置のチェックがベースとなります。これは搬出入ロボットに確実で衝突しない経路を指示するための、唯一の手段です。このすべてを、既存の生産プロセスに組み込む必要があります。時間の遅れを排除し、部品の位置決めはミリ単位で正確でなければなりません。
これに対処するため、VMT はシステムあたり4 台の 3D カメラを使用しています。4 台のセンサーがそれぞれ、画像フィールド全体の一部分を記録します。これは 2 台のコンテナで構成でき、それぞれおよそ 1.5 x 2 x 1.5 m (D x W x H) です。カメラのうち 2 台は 1 つのコンテナにフォーカスします。
この結果、それぞれ 2 つの視点からのデータで、3D 点群の高品質の情報が得られます。これら4つのセンサーの点群は、その後の評価のために合成されます。その過程で、コンテナの関連する特徴のレジストレーションは、点群全体のROI(Region of Interest)で行われる。レジストレーションとは、6自由度すべてのモデルを使用して、特徴を正確に位置決めすることです。他の ROI では、積載中に衝突を招く可能性がある干渉輪郭が探索されます。最後に、全体的な画像が保存された参照モデルと比較されます。このようにすると、コンテナの状態と位置を、完全に自動化された方法で同時に確認できます。変形したコンテナや傾いたコンテナも処理できます。また、この情報はすべて、品質管理システムで使用するために記録され、すべてのコンテナの状態を追跡できます。校正、測定データの統合、およびその後の評価は、画面の視覚化、操作要素、および各ロボット制御への接続を備えた別のIPC(産業用コンピュータ)で行われます。
画像処理ソリューションの主な結果はマルチベクター補正です。これにより、ロボットは部品を次に可能な適切な配置位置に挿入できるように調整されます。2 番目の結果は、充填を妨害する、コンテナ内の干渉するエッジや物体に起因するエラーメッセージです。全体的に状態の良くない破損したコンテナを検出し、データを利用して除外できます。画像処理全体は、VMT が開発した画像処理ソフトウェア MSS (マルチセンサーシステム) で実行されます。FrameSense は操作が簡単になるように設計され、現場で他のコンポーネントにも直接変換できます。
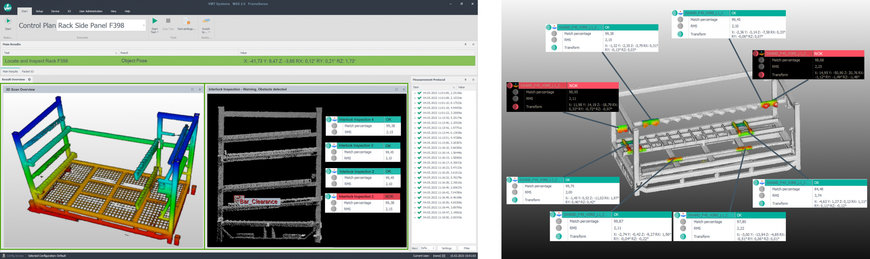
測定データの評価と視覚化
頑丈な 3D カメラシステム
カメラ側では、VMT は Ensenso 3D カメラを利用し、当初は X36 モデルでした。現在、FrameSense は拡張段階にあり、Ensenso C モデルを搭載しています。この変更の理由は主に、新しい投影プロセスによるプロジェクターのパフォーマンスの改善と、優れた速度です。さらに、Ensenso C により、測定可能な体積が増大しました。これは FrameSense にとって重要な基準で、ロボットは、充填対象のコンテナに、特定の距離までしか近づけないからです。Ensenso C の仕様は VMT の要件にぴったり一致していると、プロジェクトマネージャー兼テクノロジーマネージャーの Andreas Redekop 氏は説明します。「高性能プロジェクターと高解像度、それに高速データ処理は、私たちがカメラを選ぶ際の主な技術面での基準でした。固定されたハウジングへの設置もまた、メリットです」
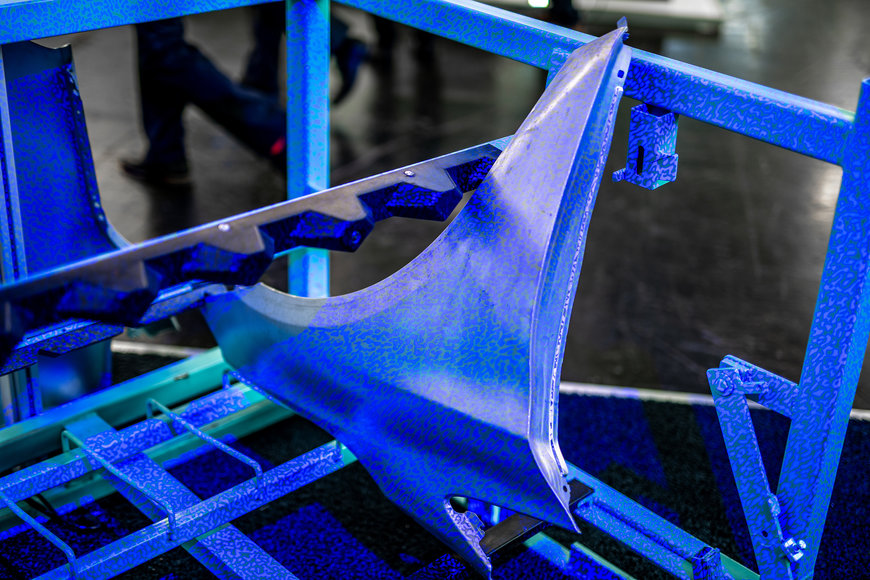
高強度のプロジェクターがサポートする Ensenso C は、高コントラストのテクスチャを画像処理対象の物体に投影します。
Ensenso C はオートメーションおよびロボティクス産業における現在の課題に対処します。他の Ensenso モデルと異なり、3D と RGB カラー情報の両方を提供します。そのため、より有意義な画像データを活用できます。丈夫な 3D カメラシステムのハウジングは、保護クラス IP65/67 の要件を満たします。解像度 5 MP を実現し、現在からおよそ 455 mm までのベースラインに対応します。つまり、より大型の物体も確実に検出できることになります。カメラはすばやく容易に操作でき、医療技術、物流、ファクトリーオートメーションなど、主に大容量アプリケーションに対応します。

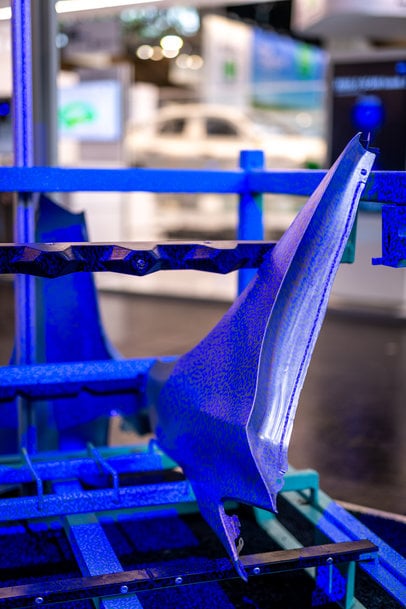
4 台の Ensenso C カメラが積み重ねられたコンテナの輪郭を撮影
今後の予定
コンテナを自動的に搬出入し、統合された 3D コンテナ検査により、FrameSense を利用して手動のワークステーションを自動化できます。熟練した作業員の不足という状況にあって、システムは自動車業界などのプロセスオートメーションにおいて大きく貢献します。業界に広まっている課題を解決します。Ensenso C は、データ生成に欠かせないベースとなり、多数のアプリケーションの要件を満たします。製品管理の Lukas Neumann 氏は、この付加価値を特に重視しています。「プロジェクターの高出力と大型センサー解像度は、イントラロジスティクスの現場では特に有利です。ここでは、高精度の部品を、離れたところから大きな測定体積で把持しなければなりません」 従来の物流におけるその他の積み重ね用途やビンピッキング用途では、プロジェクターが高出力でも解像度が低く、速度が速い同様のカメラが考えられます。
「見る」ロボットと組み合わせることで、さらなる開発およびオートメーションソリューションは進化を続けます。
カメラ
Ensenso C
使用されたモデル: Ensenso C57-8-M

クライアント
VMT Vision Machine Technic Bildverarbeitungssysteme GmbH は、個々のターンキー型の画像処理およびレーザーセンサーシステムを、あらゆるセクターの業界に供給しています。システムソリューションは、アプリケーション範囲全体をカバーする、自社開発の製品ラインをベースとしています。Pepperl+Fuchs Group の高性能ネットワークのコンピテンスセンターとして、VMT は最先端のテクノロジーを提供し、投資を最大限に保証しています。
https://vmt-vision-technology.com/
