
多様な運用設計ドメインの自律開発を加速
dSPACEは、拡大を続ける運行設計領域(ODD)に対応した先進運転支援システム(ADAS)と自動運転(AD)テクノロジの開発を加速するため、GeoMate社と業務提携を結びました。
www.dspace.com
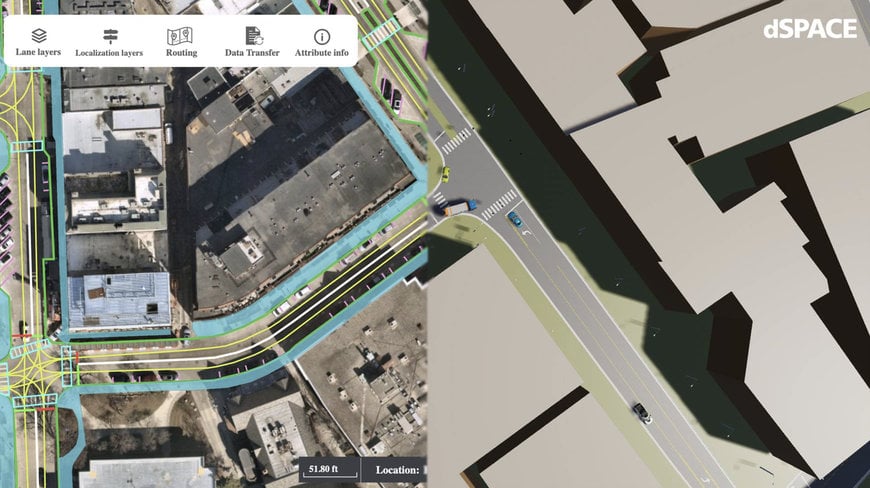
これにより、dSPACEは、AIベースのマッピングの専門企業であるGeoMate社が有するOpenDRIVE形式のロードネットワーク定義ファイルや、高度に自動化された一貫性のある現実世界の3DモデルをdSPACEシミュレーションエコシステムに統合しました。このモデル統合により、自動運転車両の開発者は、高解像度の地理的画像データとディープラーニング技術に基づき、さまざまなシナリオを用いて広範な仮想テストドライブを迅速に実行できるようになります。今回の協力の目的は、自動運転車両のシミュレーションや妥当性確認の精度、効率性、および信頼性を向上させることです。
GeoMate社のCTOであるNastaran Saberi博士は、「当社は、スピード、パフォーマンス、およびコスト効率に優れた革新的なAIベースのアプローチを通じて、各種のADAS/ADシステムやシミュレーション環境に対応したコンパクトなHDマップを作成しています。当社のパイプラインでは、よりコスト効率の高いデータソースとして高解像度の地理空間データを使用することでそれを実現しています。この手法は、LiDARを使用したHDマップ作成に比べ、かなりコスト低減ができます」とし、「当社のコンパクトなHDマップは現実世界のシミュレーション環境(RealSimE)に変換され、ベースレイヤーとして機能することで、お客様は当社のシミュレーションデータを効果的に用いてADシステムの機能を拡張できるようになります」と述べています。
dSPACEのシナリオ部門のプロダクトマネージャであるMichael Klugeは、「GeoMate社の詳細かつ総合的なマップを当社のAURELIONおよびASMシミュレーションソリューションにシームレスに統合することにより、お客様が自社のADAS/ADシステムの検証およびセンサシミュレーション向けのさまざまな機能を拡張できるようになります」と述べています。
dSPACE Automotive Simulation Models(ASM)やセンサシミュレーション向けのAURELIONといった検証および妥当性確認ソリューションを補完するうえでは、多くのパートナー企業との協力によって得られるシミュレーション用の素材が不可欠です。また、各種の自動運転機能やセンサ機能を効果的に検証するには、道路の基本的な属性を正確に表現する現実ベースの3D環境モデルが必要となります。GeoMate社のASAM OpenDRIVE形式ファイルをdSPACEプラットフォームにシームレスに統合することの主な利点の1つは、ユーザがソフトウェアスタック開発用の地図データとテスト用の地図データを共用できることです。
GeoMate社との協力を通じて、dSPACEは自動運転テクノロジのシミュレーションと妥当性確認の分野における新たな基準を確立し、自動運転車両の効率的かつ安全な開発に大きく貢献するツールを提供したいと考えています。
これにより、dSPACEは、AIベースのマッピングの専門企業であるGeoMate社が有するOpenDRIVE形式のロードネットワーク定義ファイルや、高度に自動化された一貫性のある現実世界の3DモデルをdSPACEシミュレーションエコシステムに統合しました。
www.dspace.com
