
AI搭載ドローンが高精度ナビゲーションでインフラ点検を革新
クラーゲンフルト大学がリアルタイムの対象物相対ナビゲーションを開発し、電柱の絶縁体など難所の自律点検を可能に。
en.ids-imaging.com

オーストリア連邦気候政策・環境・エネルギー・モビリティ・イノベーション・技術省(BMK)の資金提供を受けたこの研究プロジェクトの一環として、ドローンは電柱と電柱の絶縁体を自律的に認識する必要があります。ドローンは絶縁体の周囲を3メートルの距離で飛行し、写真を撮影します。「カメラの記録を複数の点検飛行間で比較できるように、正確な位置特定が重要です」と、クラーゲンフルト大学ネットワークシステム制御研究グループの博士課程学生でメンバーであるThomas Georg Jantos氏は説明します。この前提条件として、カメラが取得した未加工のセンサーデータから、対象物に関するいわゆる意味情報を抽出できる対象物相対ナビゲーションが必須です。意味情報は、この場合カメラ画像のRAWデータを「理解可能な」形に変換し、環境を単に記録するだけでなく、関連するオブジェクトを正しく識別し位置特定することを可能にします。
この場合、画像のピクセルは単なる独立した色値(例:RGB値)としてではなく、対象物の一部(例:絶縁体)として解釈されます。従来のGNSS(Global Navigation Satellite System)とは対照的に、このアプローチは空間内の位置だけでなく、検査対象物体に対する正確な相対位置と方向も提供します(例:「ドローンは上部の絶縁体の左1.5mに位置している」)。重要な要件は、画像処理とデータ解釈に遅延がないことです。これにより、ドローンは検査タスクの特定の状況や要件にリアルタイムでナビゲーションとインタラクションを調整することができます。
Thomas Jantos氏と検査用ドローン - 写真:aau/Müller
インテリジェント画像処理による意味情報
画像処理において、オブジェクト検出、オブジェクト分類、オブジェクト配置予測は人工知能を用いて行われます。「GNSS ベースのドローンを用いた検査手法とは対照的に、当社の AI は意味情報により、検査対象のインフラを特定の再現可能な視点から検査することが可能です」とThomas Jantos氏 は説明します。「さらに、大型インフラや谷地によるマルチパスやシャドウイングといったGNSSの一般的な問題も発生しないため、信号の劣化や安全リスクを回避できます。」

クアッドコプターのナビゲーションカメラとして機能するUSB3 uEye LE
小型クアッドコプターにどの程度の AI を搭載できるのでしょうか?
ハードウェアのセットアップは、Pixhawk PX4 オートパイロット、オンボードコンピュータとして NVIDIA Jetson Orin AGX 64GB DevKit、IDS 製の USB3 Vision 産業用カメラを搭載した TWINs Science Copter プラットフォームで構成されています。「課題は、人工知能をこの小さなヘリコプターに搭載することです。ドローンに搭載されたコンピューターは、AIのトレーニングに使用されるコンピューターと比べてまだ処理速度が不足しています。最初の成功したテスト結果を踏まえても、これは現在も研究のテーマとなっています」と、Thomas Jantos氏はオンボードコンピューターでの使用を目的とした高性能AIモデルのさらなる最適化に関する課題を説明しています。
一方、カメラは大学のドローンホールでのテストが示すように、完璧な基本データを即座に提供しています。適切なカメラモデルを選択する際には、速度、サイズ、保護等級、そして何より価格の要件をを満たすだけでは十分ではありませんでした。「カメラの性能は、検査システムの革新的なAIベースのナビゲーションアルゴリズムにとって不可欠です」とThomas Jantos氏は述べています。彼は、uEye LEシリーズから、省スペースでコスト効率に優れたプロジェクトカメラであるU3-3276LE-C-HQモデルを選択しました。搭載されている Sony Pregius IMX265 センサーは、3 MP クラスで最高の CMOS イメージセンサーであり、3.19 メガピクセル(2064 x 1544 px)の解像度と最大 58.0 fps のフレームレートを実現します。1/1.8インチのグローバルシャッターは、ローリングシャッターと比較して短い露光時間でも「歪んだ」画像を生成しないため、センサーの性能に決定的な役割を果たします。「安全で堅牢な検査飛行を確保するためには、高画質と高いフレームレートが不可欠です」とThomas Jantosは強調します。ナビゲーションカメラとして、uEye LEは検査対象物に対する相対位置と姿勢を計算するためにオンボードコンピュータが必要とする包括的な画像データを内蔵AIに提供します。この情報に基づいて、ドローンはリアルタイムで姿勢を補正することができます。
IDSカメラはUSB3インターフェース経由でオンボードコンピュータに接続されています。「IDS peak SDK を使用することで、カメラとその機能を ROS (Robot Operating System) に、ひいては当社のドローンにとても簡単に統合することができます」とThomas Jantos 氏は説明します。IDS peak は、効率的なRAW 画像処理と、オートエクスポージャー、オートホワイトバランス、オートゲイン、画像ダウンサンプリングなどの記録パラメータの簡単な調整も実現します。
高度な自律性、制御、タスク管理、安全モニタリング、データ記録を確保するため、研究者たちはオープンソースの CNS Flight Stack をオンボードコンピュータで使用しています。CNS Flight Stack にはナビゲーション、センサーフュージョン、制御アルゴリズム用のソフトウェアモジュールが含まれており、再現性がありカスタマイズ可能なタスクを自律的に実行することができます。「CNS Flight Stack のモジュール性と ROS インターフェースにより、センサーと位置検出用の AI ベースの「状態推定器」をスタック全体にシームレスに統合することができ、自律的な UAV 飛行を実現しています。当アプローチの有効性は、クラーゲンフルト大学ドローンホール内の送電鉄塔周辺での点検飛行の例を用いて分析・開発されています」とThomas Jantos氏は説明しています。
CNS Flight Stackに関する情報
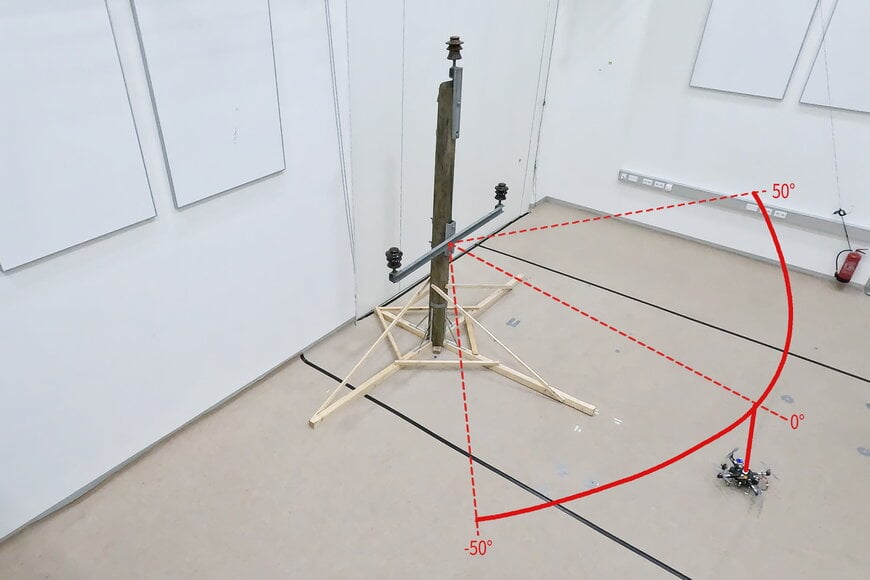
クラーゲンフルト大学の研究施設で、3つの絶縁体を持つ電力鉄塔のモデル周囲を飛行する点検飛行の飛行経路の視覚化
センサーフュージョンによる正確で自律的な位置合わせ
ドローンの高周波制御信号は、IMU(慣性測定ユニット)によって生成されます。カメラデータ、LIDAR、または GNSS(全地球測位衛星システム)とのセンサーフュージョンにより、ドローンのリアルタイムナビゲーションと安定化が可能になります。例えば、位置補正や検査対象物との正確な位置合わせなどに活用できます。クラーゲンフルトのドローンでは、PX4のIMUがEKF(拡張カルマンフィルター)の動的モデルとして使用されています。EKFは、最後に確認された位置、速度、姿勢に基づいて、ドローンが現在あるべき位置を推定します。新しいデータ(IMU、GNSS、カメラなど)は最大200Hzで記録され、状態推定プロセスに組み込まれます。
このカメラは50 fpsで1280×960pxの解像度でRAW画像を撮影します。「これは、ドローンのオンボードコンピュータ上で当社のAIモデルが達成可能な最大フレームレートです」とThomas Jantos氏は説明します。カメラを起動すると、オートホワイトバランスとゲイン調整が1回実行され、オートエクスポージャーコントロールはオフのままになります。EKFは予測値と測定値を比較し、推定値を適切に補正します。これにより、ドローンは安定性を維持し、高精度で自律的に位置を保つことができます。

クラーゲンフルト大学ドローンホール内の絶縁体付き電力鉄塔がテスト飛行に使用されている様子
今後の展望
「移動ロボットの研究分野では、産業用カメラはさまざまなアプリケーションやアルゴリズムに必要です。このようなカメラには、堅牢性、コンパクトさ、軽量性、高速性、高解像度といった特性が求められます。また、移動ロボットの貴重な計算時間とリソースを節約できるため、デバイス上での前処理(ビニングなど)も非常に重要です」とThomas Jantos氏は強調します。これらの機能を備えたIDSカメラは、この有望な研究アプローチにおいて、重要なインフラの自律検査における新たな基準を確立するお手伝いをしています。これにより安全性、効率性、データ品質が大幅に向上します。
画像の権利: Alpen-Adria-Universität (aau) Klagenfurt
© 2025 IDS Imaging Development Systems GmbH
クライアント
![]()
ネットワークシステム制御(CNS)研究グループは、インテリジェントシステム技術研究所の一部です。クラーゲンフルト大学で、英語による学士課程および修士課程「ロボティクスと AI」および「情報通信工学(ICE)」の教育に携わっています。このグループの研究は、制御工学、状態推定、経路および運動計画、動的システムのモデリング、数値シミュレーション、および集団移動ロボットの自動化に焦点を当てています。:詳細情報
カメラ

uEye LE - お手頃な価格で省スペースのプロジェクトカメラ
使用されたモデル:U3-3276LE Rev.1.2
カメラファミリー:uEye LE
www.ids-imaging.com
